Podvodních robotů, kteří stále častěji nahrazují potápěče a miniponorky, neustále přibývá. Většina z nich vypadá tak, jak je známe – krabice s mnoha malými lodními šrouby, umožňujícími dokonalé manévrování ve všech směrech. Existují ale také výjimky! Někteří konstruktéři se totiž inspirují pohonem vodních živočichů, nejen ryb, ale také želv, krabů, červů a dokonce i vyhynulých vodních dinosaurů.
Důvodů, proč právě u robotů (AUV – Autonomous Underwater Vehicles) nebo dálkově ovládaných podvodních strojů (ROV – Remote Operated Vehicles) zavrhnout starý dobrý lodní šroub a začít opisovat od přírody, je dost. Není totiž žádnou náhodou, že mořští živočichové lodní šrouby nemají. Nezřídka pak díky tomu obývají i prostředí, která jsou pro současnou lidskou techniku těžko dostupná.
AUV a ROV s neobvyklými druhy pohonu jsou často pracemi studentských týmů prestižních univerzit. Ty mají pod vedením profesorů zajímavým způsobem proměnit své teoretické znalosti z poslucháren na skutečný stroj. Nejednou přitom ale řeší i konkrétní zadání průmyslových podniků, armády a dalších institucí. Pro ně je hlavně zajímá to, že takový pohon může být tišší, úspornější a přitom nabízí lepší manévrovací schopnosti. V některých případech pak tyto stroje slouží i biologům při výzkumu pohybu vodních tvorů, současných i těch, kteří se v mořích proháněli před desítkami milionů let.
Jako ryba ve vodě
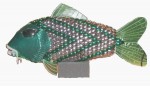
Neobvyklý cíl si vytyčil kybernetik Jindong Liu z katedry počítačů na britské University of Essex. Chce sestrojit robotickou rybu, která by se v moři pohybovala nejen stejným způsobem jako ty živé, ale také zcela samostatně bez jakéhokoliv dálkového ovládání. Napodobení pohybu skutečného živočicha je ovšem tím nejmenším problémem a Liuovy výtvory už ho v bazénu hravě zvládnou, i když hloubka ponoření je zatím jen pár metrů. Mnohem obtížnější je vyřešit počítačové vidění, autonomní orientaci v trojrozměrném prostoru a vybavení robotického tvora prvky umělé inteligence.
Zatím poslední elektronická ryba z Essexu je dlouhá přibližně metr, má místo očí dvě citlivé kamery, okolí ohmatává ultrazvukovým sonarem a je prošpikována špičkovou počítačovou technikou. Podobní roboti by jednou mohli v moři plout s hejny ryb a zkoumat tak život oceánů.
Ocasní ploutev na baterii
Podobně jako ryby, se ve vodě pohybují i mořští savci, jen s tím rozdílem, že ocasní ploutví nepohybují horizontálně, ale svisle. Jejich pohon za pomoci podmořských kamer zkoumala profesorka Terrie Williamsová z University of California v Santa Cruz. Cvičení delfíni Puka a Primo, stejně jako několika tuleňů a lachtanů z mořského akvária, se stalo předlohou metr dlouhého robota ve tvaru válce. Jeho ocasní ploutev poháněla dvanáctivoltová baterie.
Ještě důležitějším výsledkem výzkumu však byl matematický model manévrování tohoto stroje. Ten umožní využít pohon ocasních ploutví i pro některá větší zařízení.
Proč čtyři ploutve?
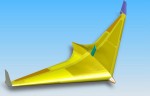
Dálkově ovládaný podvodní stroj Madeleine postavili John Long a jeho kolegové z Vassar College v Durhamu (Severní Karolína, USA) podle druhohorního plesiosaura. Ženou jej vpřed čtyři pohyblivé ploutvovité plochy po stranách trupu.
Pohon čtyřmi ploutvemi přitom dnes ale není v živočišné říši příliš obvyklý. Téměř všechny ryby, kytovci, stejně jako mnoho obojživelníků, používají jako „hlavní hnací jednotku“ silný ocas. Ostatní malé ploutvovité končetiny používají hlavně pro manévrování.
Další skupina vodních tvorů (vodní želvy, tučňáci, ploutvonožci atd.) sice nepreferují ocas, ale využívají k pohonu jen dvě ploutve, obvykle přední. Inženýři proto chtěli vědět, jaké jsou přednosti pohonu čtyřmi ploutvemi, zatímco biologové toužili zjistit, k čemu jej plesiosauři potřebovali.
A právě pro ukojení této zvědavosti byla postavena Madeleine. Řečeno slovy Johna Longa: „Čtyřploutvový podvodní robot testuje biologické teorie mechanických vazeb a nervové kontroly více končetin používaných pro plavání“.
Elektronický dinosaurus
Jméno Madeleine vybrali konstruktéři pro podobnost svého výtvoru s jedním druhem francouzského moučníku. Stroj je sice ovládán na dálku pomocí joysticku (ruční ovladač) a tenkého kabelu, má ale celou řadu vlastních senzorů (sonary, kamery, hloubkoměr, sklonoměr a akcelerometr), které mu společně s počítačem v případě potřeby zajišťují plnou autonomii pohybu.
Testy robota ale ukázaly, že použití čtyř ploutví na první pohled moc výhodné není. Ve srovnání s režimem využívajícím jen dvou ploutví rychlost nevzrostla, zato se zvýšila spotřeba energie a přibyly neužitečné turbulence. Z dalších zkoušek ale vyplynulo, že čtyři ploutve přece jen nějaké přednosti mají. Umožňují totiž rychlý start, obraty s velmi malými poloměry a rychlé zastavení pohybu ve vodě. Zdá se proto, že plesiosauři byli dravci, kteří na svou kořist útočili ze zálohy. Po jejich vyhynutí se však evoluce k tomuto řešení pohonu už nevrátila.
Robot tedy evolučním biologům pomohl objasnit jednu část vývoje obratlovců. Zkušenosti ze stavby a zkoušek Madeleine ale autoři využijí především pro vývoj dalších autonomních podvodních strojů. Videozáběry pořízené při jejích testech totiž jasně dokazují, že stroj poháněný ploutvemi má takové manévrovací schopnosti, jakými se AUV s lodními šrouby většinou pochlubit nemohou.
Tak manévrují vodní želvy
Podobný způsob pohybu má i podvodní robot Gamera studentského týmu Duke University v americkém Durhamu. I v tomto případě ženou stroj ve vodě čtyři ploutvovité plochy. Jejich osy míří do společného středu, takže dovolují snadné otáčení. Takto manévrují například vodní želvy.
Trochu jinak šli na roboty s ploutvemi na americkém Massachusetts Institute of Technology (MIT). Jejich válcovitý stroj, vyvinutý s podporou Centra válečného námořnictva pro podmořské zbraně, má dokonce dvě trojice ploutví. Toto řešení by mělo umožňovat mimořádně obratný pohyb všemi směry.
Kudy kráčejí umělí krabi?
Celá řada vývojových pracovišť se zajímá o to, jak se po mořském dně pohybují krabi a další korýši. Bezprostřední kontakt s podkladem totiž má ve vodě řadu výhod. Dovoluje například spolehlivou stabilizaci polohy v proudu nebo v příboji. Lezoucí roboti by se proto mohli uplatnit při kontrole zařízení na dně, nebo při hledání a odstraňování min.
Jedním z podmořských strojů, který si vzal vzor z krabů, sestrojili vědci z City University Hong Kong. Je určen pro vnitřní inspekce potrubí naplněných vodou, proto se pohybuje pomocí čtyř končetin podobných krabím. Na „palubě“ má kromě senzorů polohy a hloubky také kameru s vysokým rozlišením, jejíž obraz je řídícímu stanovišti předáván pomocí ultrazvuku. Stejně putují opačným směrem řídící povely. Energii obstarává baterie zabudovaná přímo v trupu, takže stroj za sebou nemusí tahat žádný kabel. Nohy mají elektrohydraulické „svaly“ a dokáží robota bezpečně posouvat i proti toku proudící kapaliny, stejně jako přes usazeniny a jiné překážky v potrubí.
Inspirovat mořskými korýši se nechali také konstruktéři z Centra námořního výzkumu v Northeastern University (USA). V rámci programu Biomimetic Underwater Robot Program (Program podvodních robotů napodobujících přírodní vzory) vyvinuli osminohého robota, který se díky mnoha senzorům může pohybovat po dně zcela samostatně. Zajímavostí je ocasní ploutvička „okopírovaná“ od langust, sloužící ke stabilizaci pohybu a k plavání na krátké vzdálenosti.
Inspirace ze světa hadů a červů
Plazení často vnímáme jako primitivní, a někdy i tak trochu odporný způsob pohybu. Přesto může být inspirativní. Hadům a červům umožňuje úspěšnou existenci nejen na souši, ale i ve vodě a v podzemí. Japonští kybernetici proto sestrojili robota Slim Slime, který přesně napodobuje způsob pohybu těchto tvorů. Jeho vyspělejší potomci možná jednou budou schopni plnit úkoly v nepřístupných a nebezpečných prostorách.
„Proč se hadi tak dobře pohybují, přestože nemají nohy?“ Tuto otázku si položil profesor Šigeo Hirose z Tokijského technologického institutu a pokouší se na ni najít odpověď způsobem veskrze japonským. Staví roboty pohybující se na podobných principech jako hadi, měkkýši nebo červi. Výhodou této koncepce je schopnost strojů proniknout do velmi těsných prostor, například do potrubí a jiných instalací, důlních děl a jeskyň, stejně jako do trosek budov. Další předností mechanismů pro plazivý pohyb, oproti složité konstrukci jiných druhů pohonu, je jednoduchost a spolehlivost.
Tým profesora Hiroseho pomocí videotechniky a počítačového modelování studoval způsoby pohybu beznohých tvorů v nejrůznějších situacích, od prostého plazení až po šplhání ve větvích. Výstupem výzkumu je pestrá škála praktických aplikací, například záchranný pás který automaticky přesně přilne k tělu člověka, citlivé uchopovací zařízení, mechanismus „inteligentně“ rozprostírající svou hmotnost na nepevném terénu (písek, bažiny) a především několik typů robotů.
Červí robot
K zatím posledním a nejpokročilejším patří Slim Slime, robot dokonale napodobující pohyb červů. Tělo červího robota se skládá z šesti válcovitých modulů, které se mohou smršťovat a natahovat nejen jako celek, ale také pouze na kterékoliv straně, případně na každé straně v jiném čase nebo i v opačném směru.
Děje se tak pomocí stlačeného vzduchu, který do měchýřků po stranách modulu rozvádějí miniaturní ventily ovládané počítačem. Každý z modulů o průměru 128 milimetrů je při roztažení dlouhý 117,4 milimetru a při maximálním smrštění 114 milimetrů. Celý dvanáctikilový stroj se tak může natáhnout až na délku 1,12 metru nebo smrštit na 73 centimetrů.
Především ale koordinovaně natáčí své články a přenáší mezi nimi váhu tak, že se může pohybovat libovolným směrem a několika způsoby. Vlnovitě se plazí jako had, smršťuje se a roztahuje jako plži, umí ale také bočně „válet sudy“, nebo se celý obrátit o 180 stupňů. Dosahuje maximální rychlosti 60 milimetrů za vteřinu.
Podle svých konstruktérů najde Slim Slime Robot řadu uplatnění při práci v prostředích, která jsou člověku nebezpečná: při kontrole potrubí v chemických provozech a jaderných elektrárnách, při hledání a záchraně lidí ze zřícených staveb, nebo při zneškodňování min.
Co je to biomimetika?
Oboru, který při konstrukci technických zařízení vychází z přírodních předloh, se říká biomimetika. Podle mnoha odborníků jsou řešení vyvinutá přírodou velmi efektivní a mají nízké nároky na spotřebu energie. Stejné požadavky klade současná energetická a surovinová situace i na lidské stroje. Proč tedy pracně vymýšlet něco, co tady už miliony let skvěle funguje?
Přitom podle výzkumů, provedených vědci z britské University of Bath, jsou lidské technologie shodné s přírodními jen asi z 12 procent.
Biomimetika se snaží přírodní „konstrukce“ do všech detailů jejich funkce pochopit a uplatnit jejich myšlenky v technických řešeních. Pomořští roboti pohybující se podle vzoru mořských tvorů jsou jen jedním z mnoha výstupů. Biomimetika se uplatňuje v řadě dalších oborů od konstrukce letadel až po suché zipy. V poslední době zažívá tento obor velký rozmach a biomimetická pracoviště vznikají na mnoha univerzitách i výzkumných ústavech.