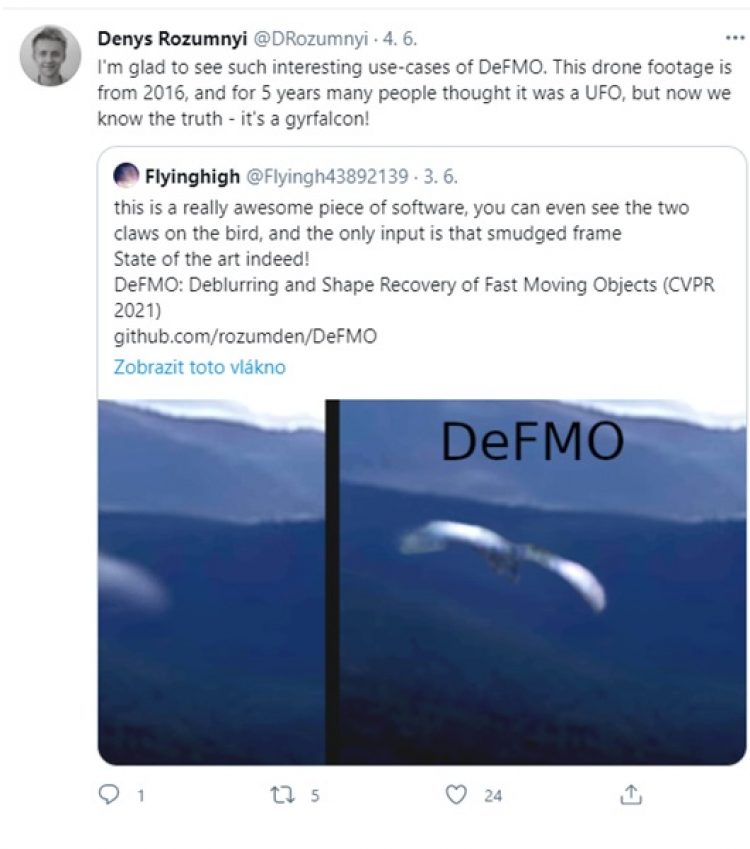
Na záběrech z dronu z roku 2016 byl v americkém státě Utah zachycen neznámý, rychle letící objekt a řada lidí od té doby žila v domnění, že jde o UFO. Pět let poté, 4. června tohoto roku, se podařilo prokázat, že šlo ve skutečnosti o sokolovitého ptáka raroha velkého.
K vyvrácení hypotézy o UFO přispěla podrobná analýza dostupných záběrů s pomocí metody DeFMO. Za speciálním algoritmem, který z jednoho rozmazaného obrázku dokáže zrekonstruovat původní objekt, stojí výzkumník Denys Rozumnyi z Fakulty elektrotechnické ČVUT (FEL)..
Absolvent Fakulty elektrotechnické ČVUT Denys Rozumnyi začal svůj výzkum rozvíjet již před pěti roky během bakalářského studia na FEL a pokračuje v něm i při současném doktorském studiu na nejlepší evropské technické univerzitě ETH Curych.
Pod vedením odborníka na počítačové vidění, prof. Jiřího Matase z FEL ČVUT, začínal s detekcí rychle se pohybujících objektů. Následně přidal výpočet trajektorie a nakonec rekonstrukci, resp. doostření, rozmazaného pohybujícího se objektu.
„Díky mému působení na ČVUT FEL a ETH Zurich jsem dokázal spojit dva světy – detekci rychlých objektů a jejich 3D rekonstrukci,” říká Denys Rozumnyi.
„Hlavní využití, na které jsme při vývoji metody DeFMO mysleli, jsou v dopravě nebo sportu. Cílem je naučit autonomní vozidla reagovat na náhlá nebezpečí nebo třeba odhalit rychlost podání nebo rotaci míčku v tenise nebo ve fotbale,” popisuje původní motivaci absolvent FEL ČVUT. Využití při identifikaci UFO autora metody nenapadlo, ale to patří k základnímu výzkumu, že najde uplatnění v nečekaných aplikacích a kontextech.
„Kód je veřejně dostupný, takže metodu může použít kdokoli,” dodává Denys Rozumnyi.
Metoda funguje na bázi strojového učení. Trénink probíhá tak, že ostrý obrázek je nejprve synteticky rozmazán. Následně se algoritmus v daném počtu iterací snaží obrázek rekonstruovat a odstranit rozmazání tak, aby se výsledek co nejlépe přiblížil originálu.
Jakmile se algoritmus naučí objekty dostatečně dobře rekonstruovat, je schopný rozmazané obrázky velmi přesvědčivě “doostřit” dokonce v reálném čase. Fascinující je, že metoda nepotřebuje na vstupu video nebo více snímků.
Algoritmu stačí pouhý jeden snímek! Rozmazání objektu na snímku je způsobené pohybem, a proto je možné zpětně zrekonstruovat trajektorii objektu i objekt samotný.