Roboti jsou lidskými spojenci již nesmírně pestrém oboru lidský činností. Ledaskde jsou dokonce již zcela nepostradatelní. Vědci z univerzity ve švýcarském Lausanne je však nedávno využili v oboru, kde by je čekal skutečně málokdo – v evoluční biologii.
Při výzkumu evoluce mají vědci po rukou v zásadě dva typy metod. První z nás poučuje o tom, kudy se evoluce skutečně ubírala a spočívá přirozeně v pozorování současných druhů a v paleontologickém výzkumu.
Tou druhou jsou metody „od zeleného stolu“, dnes tedy spíše od klávesnice počítače. Tímto způsobem je možné hledat cesty, kudy se evoluce ubírat mohla, ale nemusela. Jedním z prubířských kamenů takového teoretického modelování je vysvětlování dobrovolného sebeobětování, tedy altruismus.
Vědci mají již dlouhou dobu za to, že altruismus se nejlépe udrží mezi jedinci, kteří jsou si vzájemně příbuzní. Zkrátka a dobře – maminka nebo tatínek se vždy obětuje spíše pro svého syna či dceru, než pro úplně cizí dítě.
Je tomu tak zjevně proto, že naši příbuzní nesou z jisté části stejné geny. Z pohledu matematického modelu se tedy maminka vlastně nestará o dítě, ale o geny, které její dítě nese. Tato teorie, kterou poprvé systematicky vyparcoval britský genetik W.D. Hamilton, je známá jako teorie příbuzenského výběru a vynikajícím způsobem vysvětluje velkou řadu jevů známých z přírody.
Teorie biologů se však často ověřují podstatně hůře, než teorie např. fyziků. Zatímco fyzikální dění ovládají zákony, o nichž předpokládáme, že jsou od počátku věků stejné, události v evoluci jsou jedinečné.
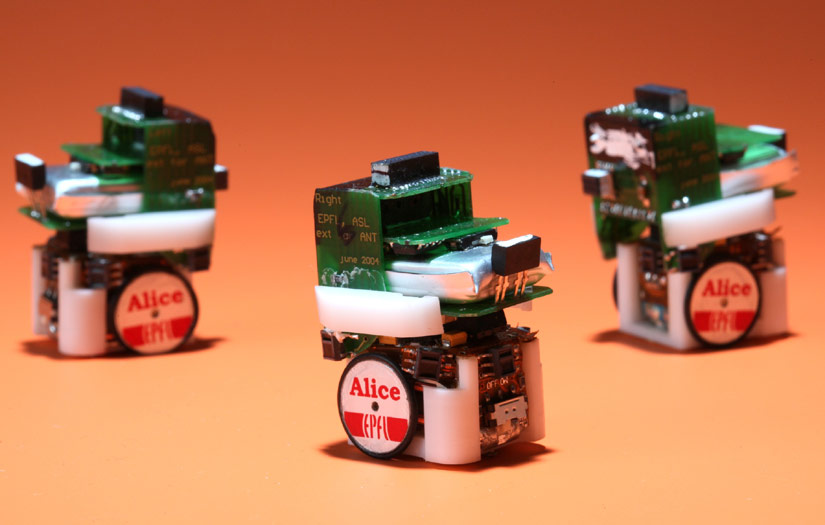
V jejich stopování mohou však mohou napomoci právě modely. A právě s takovým zhmotněným modelem přišel biolog Laurent Keller. Keller se spojil s prof. Dario Floreanem z lausannské Polytechniky, který je specailistou v robotice a společně stvořili sérii drobných robůtků krychlového tvaru, které pojmenovali Alice.
Každý z robůtků byl vybaven dvěma koly, kamerou, dobíjitelnou baterií a infračervenými senzorem určeným k rozpoznávání vzdálenosti objektů v okolí robota. Roboti se mohli pohybovat dopředu, dozadu a také rotovat na místě.
Do své experimentální arény pak vypustili 8 robotů a 8 zdrojů „potravy“. Každý z nich se mohl „rozhodnout“, zda si po nalezení ponechá zdroj pouze sám pro sebe, nebo zda se rozdělí s ostatními. Poté, co pohyb nasnímali kamerami, jej vložili do počítačové simulace a sledovali, jak by se vyvinul po 500 generacích.
„Ve všech případech se chování robotů přesně shodovalo s teoretickými předpověďmi i té nejkomplikovanější genetiky,“ shrnuje své závěry dr. Keller.