Zřejmě nejmenšího robota, který by mohl být v budoucnosti ještě výrazně zmenšen a který by s největší pravděpodobností mohl být využit pro i medicínské účely se podařilo vyvinout vědcům ve švédském Royal Institute of Technology.
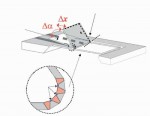
Specialisté pod vedením Ebeforse Thorbjörna vyvinuli pohyblivý vlasový křemíkový senzor, tzv. muší nohu, jehož konstrukce je z plastického polyimidu a který se vyznačuje extrémní tepelnou citlivostí a vysokou odolností. Závěs nohy tvoří 3 až 7 vláknových výplní ve tvaru „V“ z polyimidu (látky na bázi křemíku, vykazující výbornou pevnost při vysokých teplotách a mechanickém namáhání). Elektrické vířivé proudy pak odklánějí muší nohu z rovnovážné polohy. Naklonění nohy lze měřit a ovládat pomocí topných tělísek. Jsou-li tělíska vyhřívána malým elektrickým proudem, tepelná citlivost polyimidové výplně závěsu způsobí deformaci, tj. výplň ve tvaru „V“ se zploští a noha se ohne. Po odpojení proudu topná tělíska i polyimidová výplň závěsu rychle chladne a noha se vrací do původní polohy.
Malý, ale šikovný
Současný osminohý prototyp mikrorobota je velký přibližně jako moucha masařka – měří 15 mm na délku a 5 mm na šířku, pohybuje se rychlostí jeden milimetr za sekundu a unese až padesátinásobek vlastní hmotnosti. Prototyp je zatím ovládán externě pomocí zlatých vodičů dodávajících energii jednotlivým nohám, ale zároveň probíhá vývoj autonomního napájecího systému a bezdrátového dálkového řízení. Mikrorobot by měl být v budoucnu vybaven pracovním nástrojem – mikromanipulátorem, jehož pohon bude pracovat na stejném principu jako nohy robota.
Robot v lidském těle?
Vědci předpokládají, že se jim díky využití pokročilých křemíkových technologií podaří robota výrazně zmenšit. Finální verze mikrorobota by tak mohla být teoreticky schopna nezávislého pohybu. Robot by se tak mohl jako mechanický uklízeč pohybovat např. uvnitř žil pacienta, odkud bude odstraňovat nežádoucí sedimenty a kde by také mohl provádět drobné opravy poškozených žilních stěn. To je zatím sice jen vize vzdálené budoucnosti, ale jak se zdá, existuje předpoklad, že realizovatelná. Ačkoliv je tato technologie zatím jen ve stádiu základního výzkumu, projevili již o ni mimořádný zájem přední výrobci zdravotnické techniky.
Živý robot
Ačkoliv se to zdá být na první pohled prakticky nemožné, vědcům z university v Los Angeles se podařilo sestrojit jednoduché zařízení, které se pohybuje díky svalovým vláknům. Primitivní mikrorobot má velikost odpovídající přibližně polovině tloušťky lidského vlasu a jeho základem je křemíkový oblouk široký 50 mikrometrů, který je pokryt polymerem. Na obou koncích oblouku je polymer odstraněn a nahrazen tenkou vrstvou zlata, která slouží jako záchytný bod pro svalové buňky. Po té, co je tato kostra vložena do glukózového roztoku s krysími srdečními svalovými buňkami, vyrostou během tří dnů mezi konci oblouků svalová vlákna. Díky jejich opakovaným kontrakcím se mikrorobot dokáže pohybovat, podobným způsobem jako píďalka, a to rychlostí až 40 mikrometrů za sekundu, tj. přibližně jeden milimetr za 25 sekund. Využití svalových vláken jako pohonu pro mikroskopická zařízení má výhodu v tom, že jako zdroj energie poslouží takovému „živému motoru“ kapka glukózy.