
Znečištění světových oceánů je enormní, vědci se proto snaží přijít na to, jak z nich odpad odstranit. Specialisté z Institutu Maxe Plancka pro inteligentní systémy ve Stuttgartu vyvinuli podvodního robota inspirovaného medúzami, který by se tohoto úkolu mohl se ctí zhostit..
Celé ostrovy volně plujících plastů hyzdí světové oceány. Vědci v čele s oceánografem Marcusem Eriksenem zjistili během celkem 24 výprav realizovaných mezi roky 2007 až 2013, že na hladině moří pluje na 268 000 tun plastového odpadu.
Ovšem celých 70 % z celkového množství odpadků se nachází na mořském dně. Celkem tak oceány znečišťuje na 150 milionů tun odpadků. Plastovou tašku se dokonce podařilo najít i v nejhlubším místě planety, v Mariánském příkopu.
Už dnes jsou zapojováni roboti, kteří se na úklidu světových oceánů podílejí. Jsou ovšem objemní, takže nejsou schopni odebírat vzorky ve složitých a nestrukturovaných prostředích, jako jsou korálové útesy.
Navíc jsou kvůli elektrickým motorů nebo hydraulickým čerpadlům velmi hluční. Vědci z Institutu Maxe Plancka pro inteligentní systémy ve Stuttgartu proto hledali inspiraci pro robota vhodného k čistění mořského dna v oceánu. A našli ji v medúze.
Shromáždí odpad i vzorky z moře
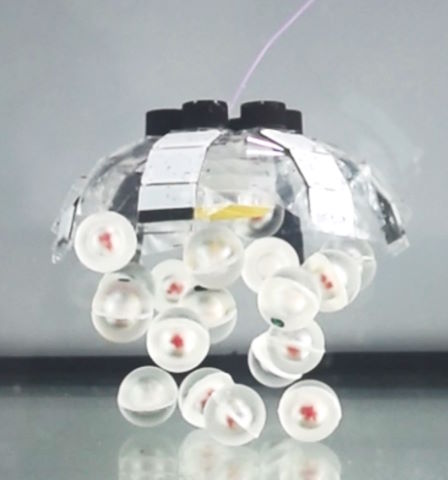
Zkonstruovali všestranného, energeticky účinného a téměř bezhlučného robota o velikosti ruky, kterého pojmenovali Jellyfish-Bot. Ten ke svému pohybu používá elektrohydraulické akutátory, které se při průchodu elektrického proudu smršťují a napodobují tak pohyb svalů.
To robotovi umožňuje plavat, případně si pod svým tělem vytvořit vodní vír. Díky tomu může „nasát“ drobné objekty a unášet je s sebou.
Takto může robot například shromažďovat drobné částečky odpadu, nebo jemně manipulovat s jikrami, aniž by je poškodil. Jeho provoz nemá navíc žádný negativní dopad na okolí, protože celé tělo robota je vodotěsné a na svém povrchu používá měkké materiály, podobně jako skutečná medúza.
Díky pohybu bez použití lodního šroubu je také velmi tichý a jím vydávaný hluk prakticky není možné odlišit od běžných zvuků oceánu.
Roboti mohou i spolupracovat
První verze Jellyfish-Bota má 6 umělých chapadel. S jejich pomocí je schopen se pohybovat rychlostí lehce přes 6 centimetrů za sekundu. Za hodinu tedy urazí zhruba 220 metrů. Robot používá dvě ze svých chapadel k přidržování věcí a zbývající čtyři pak k pohybu.
Vědci z Institutu Maxe Plancka také naučili roboty spolupracovat ve skupinách. Dva roboti například společně vyzvedli za dna potopenou chirurgickou roušku. Ve větších skupinách mohou manipulovat i s mnohem těžšími předměty.
Robot zatím ke své činnosti potřebuje drátové napájení. Tianlu Wang, jeden z autorů, kteří se na konstrukci robota podíleli, ale věří, že jednou to nebude potřeba, když říká: „Naším cílem je vyvinout bezdrátové roboty.
Už jsme učinili první krok k dosažení tohoto cíle. Robot již obsahuje všechny potřebné moduly, včetně baterie a bezdrátového ovládaní, aby v blízké budoucnosti mohl operovat zcela samostatně.“ K tomu chybí již jen odladit bezdrátovou komunikaci ve vodě.





















