Vžitá představa o průmyslových robotech, kteří se poprvé objevují v roce 1952, je, že se jedná o velké a těžké statické stroje, které dokážou vykonávat pouze předem naprogramované opakované činnosti a jsou pro lidi nebezpečné.
Do jisté míry obecně tato charakteristika stále platí, ale rozvoj mikroelektroniky, senzorů, sítí a algoritmů nastoluje novou éru semiautonomních robotů.
Stále zvyšující se složitost produktů a zároveň poptávka po individualizovaných řešeních přináší potřebu vyšší flexibility výroby. To by měli zajistit lehcí průmysloví roboti, kteří mohou snadno a rychle měnit vlastní činnost a přitom pracovat bok po boku s lidmi.
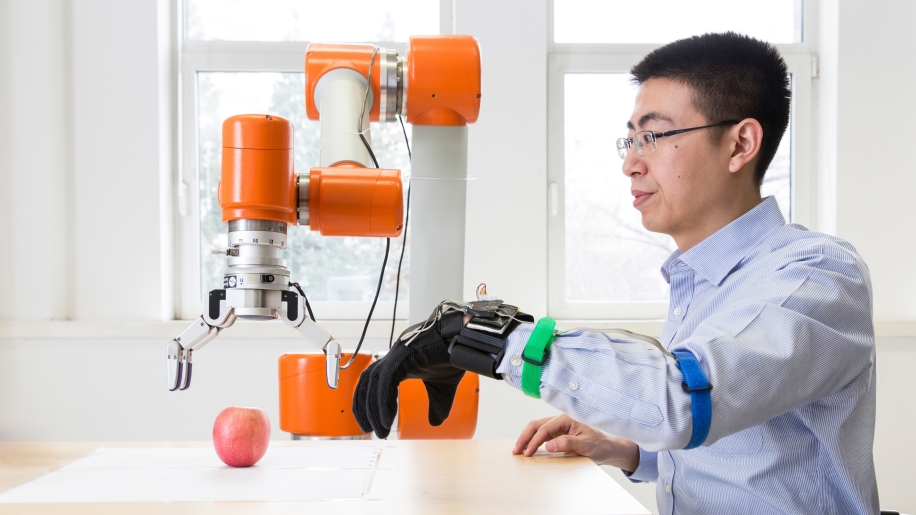
K tomu, aby mohli lidé pracovat s roboty, je potřeba, aby se spolu dokázali domluvit. Vzhledem k hluku ve výrobních procesech, se řeč ukazuje jako nevhodná. Vhodným kandidátem by mohla být právě datová rukavice, která přesně zmapuje i ty nejjemnější pohyby lidské ruky a předá je ve formě pokynů robotu.
Roboti se budou sami učit
Prototyp robotické rukavice je vybaven 17 pamětmi, včetně inerciálních a magnetických snímačů. Je založen na kombinaci senzorických vstupů, které reprezentují gesta provedená rukavicí, včetně pohybu jednotlivých prstů.
Tyto vstupy se po zpracování přenášejí do robotické paže a ruky „ve výcviku“, která se tím učí provádět konkrétní úkoly v reálném čase. Poněvadž ale technologie se stále vyvíjí, ve výuce robotů bude nasazována schopnost strojů učit se (machine learning), aby roboty dokázaly rozpoznávat stále složitějších příkazy vyjádřené gesty, aby bylo možné jim zadávat úkoly na vysoké úrovni a naučit je novým dovednostem.
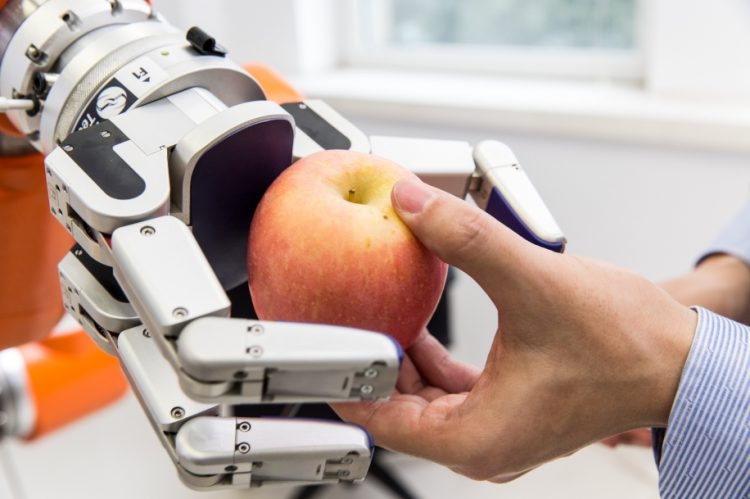
Stejně jako lidé se budou roboti muset umět učit tzv. za pochodu. Prvním krokem v tomto směru je úspěšný vývoj algoritmu, na základě kterého robotický asistent dokáže uchopovat neznámé předměty. Ačkoliv pro člověka je to úkol zcela jednoduchý, pro robota naopak.
Při řešení se vývojáři nechali inspirovat nástrojem Kinect, který vyvinul Microsoft pro herní konzole Xbox.
Kinect umí současně vyhodnocovat hloubku a RGB data z obrazu. Hloubka je základem pro výpočet uchopovacích gest, zatímco barevné spektrum GRB pomáhá vypočítat uchopovací body. Takto zpracovaný obraz uchopovaného předmětu robot porovná s uloženým modelovým příkladem.
Přesnost uchopení ale nestačí. Velice důležitá je i použitá síla, která musí být natolik velká, aby robot daný předmět opravdu zvedl, na druhou stranu ale co nejmenší, aby nezpůsobila škody. Dnes se toto řeší s pomocí předem definovaných velikostí sil, které jsou monitorovány tlakovými senzory na uchopovacím zařízení.
Bezpečnost především
Protože budou roboti spolupracovat s lidmi, je rovněž velice důležitým kritériem zajištění bezpečnosti lidských pracovníků. Čínští vědci proto nyní intenzivně pracují na vývoji nového řídicího systému, který bude současně usměrňovat pohyb i sílu robotické paže.
Horní hranici využitelné síly robotu určuje jeho lidský spolupracovník a robot si pak sám v rámci těchto mezí spočítá optimální dráhu pohybů tak, aby jeho práce byla co nejpřesnější.