Start první evropské automatické nákladní lodě Jules Verne se odkládá! Co bylo příčinou? Proč se technici museli znovu podívat do jejích útrob? A k čemu potřebuje kosmická stanice palivo?
Mezinárodní kosmickou stanici (ISS) buduje na oběžné dráze kolem Země společenství řady států. Evropa je zde zastoupena Evropskou kosmickou agenturou ESA. Kromě několika modulů se ESA zavázala vyvinout a provozovat automatické zásobovací lodě, které budou zajišťovat dopravu zásob a materiálu pro posádky na stanici působící. Na vývoj tzv. Automated Transfer Vehicle (ATV) vyčlenila ESA 600 miliónů euro. Prototyp tohoto kosmického plavidla, který slouží k testovacím účelům, byl představen v roce 2002.
Tankovat se musí!
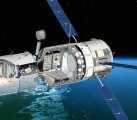
Nákladní loď má tvar velkého doutníku, tedy válce o délce 10 metrů, průměru 4,5 metru a její hmotnost přesahuje dvacet tun. Je vybavena slunečními panely. Kapacita ATV dosáhne až 7,5 tuny podle druhu nákladu, který poveze. Ve srovnání s ruskými loděmi Progress tak bude jejich nosnost až trojnásobná a naložit se dají různé kombinace zásob podle momentální potřeby kosmické stanice a její posádky.
Převážná část nákladu se vtěsná do přetlakové horní části, kterou se ATV spojí s kosmickou stanicí. Posádka stanice tak bude mít do vnitřních prostor nákladní lodě přístup a může zde i pracovat. Teoreticky, v případě krizové situace, může ATV dokonce posádce posloužit i jako dočasné útočiště.
Jednou z položek možného nákladu je i palivo pro zvýšení oběžné dráhy kosmické stanice. Ta sice obíhá ve výškách kolem 400 km nad povrchem, ale tato výška se vlivem odporu řídké atmosféry každodenně snižuje v průměru o 200 metrů. Proto je její oběžná dráha pravidelně zvyšována ať už zážehy motorů raketoplánů či lodí Progress. Stejný úkol budou mít i ATV. V opačném případě by kosmická stanice postupně klesala a nakonec by se propadla do atmosféry a byla tak zničena.
Kosmický popelář
Jednotlivé ATV se připojí k ruskému servisnímu modulu Zvezda a s kosmickou stanicí by měly být spojeny vždy půl roku. Mezitím astronautům poslouží jako sklad odpadů, aby se z oběžné dráhy postupně nestalo smetiště a nezvyšovalo se riziko srážky a poškození kosmické stanice a dalších družic. ISS prostě funguje na principu „co bylo přivezeno, musí být i odvezeno“. ATV takto může pohltit až 6340 kg odpadu, který pak shoří společně s lodí po jejím odpojení v zemské atmosféře kdesi nad Pacifikem. Podobným způsobem končí i lety ruských nákladních lodí Progress. Americké raketoplány naopak vozí odpad zpět na zemský povrch.
Aby se předešlo srážce…
Zatímco raketoplány jsou při spojovacích manévrech s kosmickou stanicí řízeny astronauty, v případě ATV – podobně jako u lodí Progress – proběhne tato kritická fáze letu zcela automaticky. Bezpečné spojení dvou těles je přitom klíčovou otázkou. Stačí si jen vzpomenout na srážku lodi Progress s bývalou stanicí Mir v roce 1997. Chybou kosmonautů na Miru tehdy narazila zásobovací loď do modulu Spektr, přičemž poškodila sluneční panely a porušila hermetičnost modulu, který musel být po nehodě uzavřen. Kosmická stanice přišla o jeden z pracovních modulů a podstatnou část svých energetických zdrojů.
Kde je ta stanice?
Jak tedy spojovací manévr probíhá? Po oddělení od nosné rakety se ATV automaticky zorientuje podle hvězd a nabere směr ke stanici. Na její palubě je už nyní instalován komunikační systém Proximity Communication Equipment (PCE), který bude poskytovat datové spojení mezi oběma objekty. Na základě dat z navigačního systému GPS bude systém PCE určovat relativní polohu obou těles. V provozu bude během posledních 30 km přibližování ATV a rovněž při samotném připojení k modulu Zvezda.
Ve vzdálenosti 500 metrů od stanice se ke slovu dostanou laserové dálkoměry. Zpočátku to bude tzv. telegoniometr, který nepřetržitě vysílá optické pulsy, znovu je zaznamenává po odrazu od reflektorů umístněných na stanici a ze zpoždění signálu určuje vzdálenost a směr pohybu ATV. Každá z lodí ATV bude vybavena dvojicí těchto přístrojů, druhý poslouží v případě potřeby jako záložní.
S hodinářskou přesností
Když relativní vzdálenost obou těles poklesne na 250 metrů, vstoupí do akce další dálkoměr, přístroj zvaný videometr. Desetkrát za sekundu vyšle laserový paprsek o jiné vlnové délce než telegoniometr. Na zadní stěně servisního modulu ISS je umístněno 26 odrazek, krychliček o hraně 2,5 cm, které jsou uspořádány do dvou obrazců. Každá z odrazek umí odrazit laserový paprsek přesně do stejného směru, ze kterého na ni dopadl. Na vzdálenost 300 metrů se tak odražený paprsek neodchýlí od požadovaného směru o více než 3 mm.
Každý z modulů ATV poveze dva videometry umístněné od sebe 20 cm. Během přibližování budou mít oba plné „ruce“ práce, jeden bude zálohovat činnost druhého. Další pojistkou proti kolizi je možnost, že se řízení spojovacího manévru v kterékoliv okamžiku může chopit posádkou ISS.
Testy na kolejích
Spojení dvou lodí, které se kolem Země pohybují rychlostí 28 000 km/hod., je obtížným úkolem. Proto jsou jednotlivé součásti systému pečlivě testovány už v pozemských podmínkách.
Zkoušky videometru proběhly v 600 metrů dlouhé testovací hale francouzské armády, ve které se po 550 metrů dlouhých kolejnicích pohybuje 120 tun vážící plošina. Na ní byly umístněny pasivní odražeče, zatímco videometr byl namontován na automatické rameno, umožňující simulovat úhlové pohyby ATV. Už první test ukázal schopnost systému nepřetržitě sledovat znaky na simulované stanici ze vzdálenosti 313 metrů až do okamžiku samotného spojení.
S extrémně těžkým nákladem
Zásobovací lodě ATV budou startovat každých 12 až 18 měsíců, podle potřeb kosmické stanice. Na oběžnou dráhu je vynesou rakety Ariane 5 startující z kosmodromu Kourou ve Francouzské Guyaně. Pro tuto raketu to bude poněkud odlišný úkol než pro jaké byla dosud užívána. Raketa musí být schopna vynést 20 750 kg vážící loď do výšky 300 km nad Zemí na dráhu se sklonem 51,6º k rovníku. Bude to poprvé, co tato silná raketa zamíří „jen“ na nízkou oběžnou dráhu, tentokrát ale s extrémně těžkým nákladem. Proto byla vyvinuta varianta Ariane 5 ES-ATV, která ve srovnání se standardní verzí dostala do vínku některé novinky.
Vzhledem k velké hmotnosti nákladní lodi musela být přepracována a zesílena horní část rakety, ve které je ATV během startu umístněn. Posazení 20 tun na vrchol rakety poněkud posune, ve srovnání s předchozími starty, její těžiště. Dosud nejtěžší náklad vynesený raketou Ariane 5 byla družice Envisat o hmotnosti „pouhých“ 8 tun. S ohledem na nové podmínky musel proto být analyzován také celý průběh letu 775 tun vážící rakety.
První stupeň nosné rakety, vybavený raketovým motorem Vulcain 2, dosáhne po osmi minutách letu oběžné dráhy. Zde uvolní horní stupeň Aestus s lodí ATV. Dvojice zážehů, oddělených 45minutovou přestávkou, pak pošle ATV směrem ke kosmické stanici. Samotný Aestus se později nasměruje zpět do atmosféry, kde shoří.
První let bude složitější
Let lodi Jules Verne se bude poněkud lišit od standardního scénáře, se kterým se počítá pro další lodi ATV. Zatímco standardní let ATV potrvá 3 – 5 dnů, Jules Verne se s ISS spojí nejdříve 10. den po startu.
Let bude svým průběhem mnohem složitější, protože jeho cílem bude mj. demonstrovat schopnost lodi poradit si s různými situacemi, které by mohly v průběhu přibližovacího a spojovacího manévru nastat. Mezi testované scénáře bude patřit přerušení přibližování a návrat zpět do bezpečné vzdálenosti. Tyto testy si vyžádají větší spotřebu raketového paliva, které proto bude při první letu hlavním a nejdůležitějším nákladem.
Komplikace a zpoždění
Při budování tak složitého zařízení jakým ATV zcela určitě jsou, se konstruktéři nevyhnutelně setkávají s předem netušenými problémy, jejichž řešení pak způsobuje odklady a zpoždění. Tomu se nevyhnula ani nákladní loď Jules Verne. Ta měla původně startovat už v roce 2004, pak byl termín startu posunut až na první polovinu roku 2006, ale na začátku listopadu 2005 oznámila ESA další odklad. Během testování se totiž objevily závady na hardware. Postižené díly již však bohužel byly uloženy hluboko do útrob rozestavěné lodi a jejich výměna si tak vyžádala spoustu času při jejich demontáži. Došlo rovněž ke změnám některých požadavků ze strany mezinárodních partnerů, s čímž jsou spojeny hlubší zásahy do softwaru. Podle posledních zpráv tak bude první ATV připraveno v březnu 2007, jeho start by se měl uskutečnit o dva měsíce později.
Pocta spisovateli
Nákladní lodi ATV budou nejsofistikovanějšími automatickými loděmi na světě. První z nich proto bude jméno slavného spisovatele 19. století náležet zcela po právu. Sám spisovatel, jeden z těch, kteří snili o kosmických letech v dobách ještě dávno před jejich rozvojem, by jistě byl takovým projektem potěšen.
„Jméno Julese Verna bylo zvoleno kvůli jeho fantastickým příběhům. Daly nám něco, o čem můžeme snít – budoucnost,“ řekl Robert Laine, manažer projektu ATV
Maximální kapacita jednotlivých druhů nákladu
840 kg pitné vody
100 kg vzduchu
860 kg paliva pro pohonný systém kosmické stanice
4700 kg paliva pro zvýšení oběžné dráhy stanice
5500 kg dalších zásob jako jsou například čerstvé potraviny, přístroje, oděvy a podobně
7667 kg celková kapacita
Technické parametry ATV
Délka 9.8 m
Maximální průměr 4.5 m
Rozpětí solárních panelů 22.3 m
Generovaná energie 3800 W (po šesti měsících na oběžné dráze)
Hmotnost samotné lodi 10.47 t
Hmotnost plné při startu 20.75 t
Pohonný systém 4 hlavní motory s tahem 490 N
28 motorů s tahem 220 N